Flexi AIV - autonom offshore transport
Oppdragsgiver: Solwr Robotic AS & Uptime
Rolle: Innsiktsarbeid og visualisering
År: 2023-2024
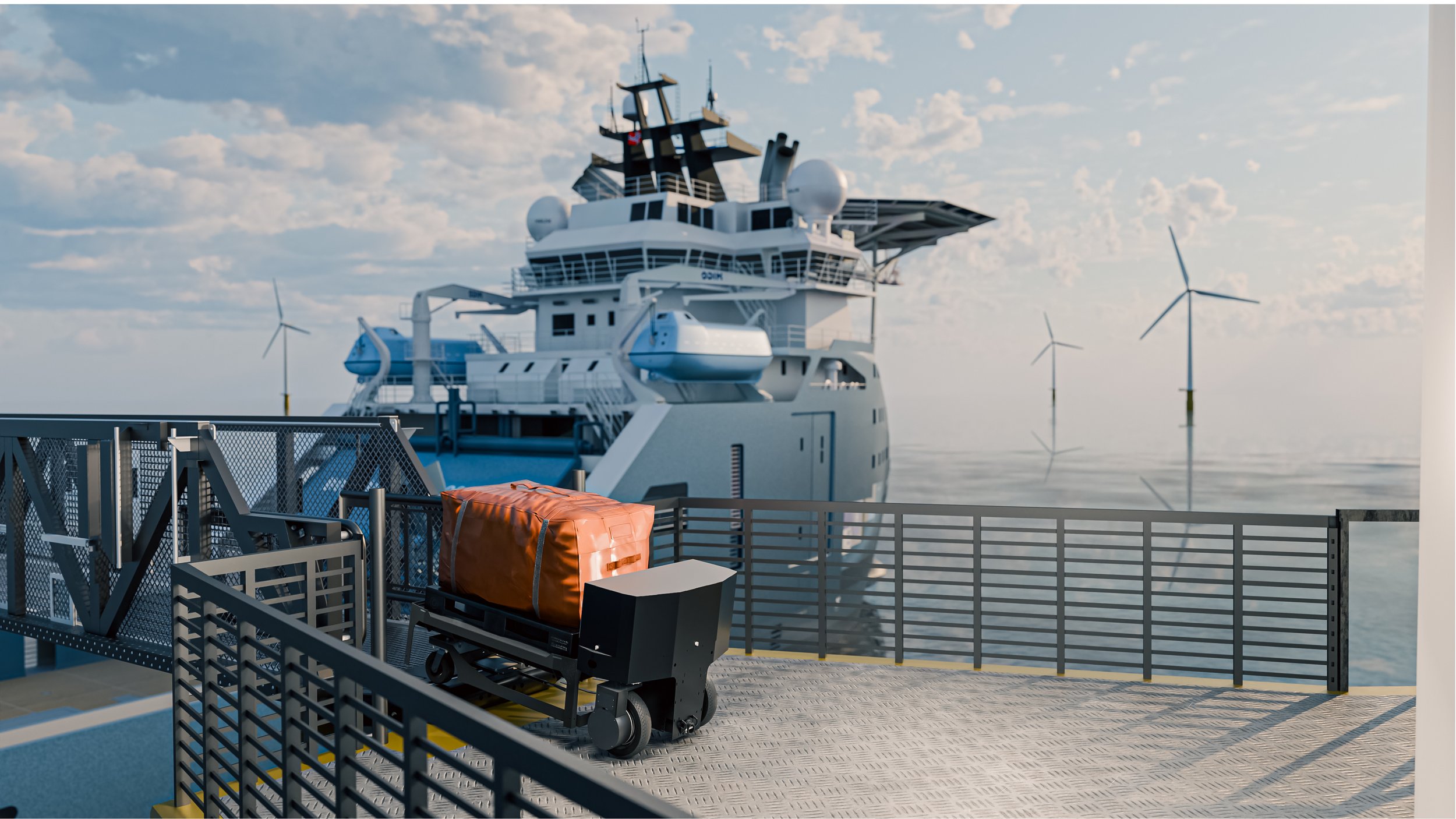
Flexi AIV er en autonom transportrobot utviklet for å frakte gods mellom skip og offshore vindmøller. Oppdraget, gitt av Uptime, kombinerte avansert teknologi med grundig innsikt i brukernes behov og arbeidsmiljø. Jeg bidro med designforskning og visualisering for å legge et solid grunnlag for produktutviklingen.
Utforsking av brukskontekst og behov:
Gjennomførte undersøkelser, intervjuer og observasjoner blant brukere og i deres arbeidsmiljøer.
Kartla arbeidsflyt og identifiserte utfordringer i overgangen mellom skip og vindmøller.
Dokumenterte og strukturerte innsikten, som ble presentert gjennom workshops for teamet og fungerte som grunnlag for videre utvikling.
Visuell konseptutvikling:
Samarbeidet med Mark Sullivan fra EGGS Design for å utvikle detaljerte renders av 3D-modellen.
Utviklet visualiseringer som kommuniserte konseptet til både ingeniører og interessenter, og bidro til en felles forståelse av prosjektets mål.
Min rolle i prosjektet
Dette prosjektet ga meg dypere innsikt i offshore-logistikkens utfordringer og viktigheten av:
Brukerorientert tilnærming i et svært spesialisert miljø.
Visuell kommunikasjon for å bygge bro mellom design og ingeniørarbeid.
Tverrfaglig samarbeid for å utvikle teknologisk avanserte løsninger.
Designverkøy: Miro, Adobe illustrator, Blender, Adobe Photoshop
Erfaring og lærdom




