Grab™ - The mobile picking robot
Oppdragsgiver: Solwr Robotic AS
Rolle: Industriell designer (produkt + UX)
År: 2020-2025 (pågående)
Grab™ er en mobil plukkerobot utviklet for å håndtere tunge løft og optimalisere lagerdrift. Siden 2020 har jeg vært en del av utviklingen, fra en prototype til en ferdig løsning i drift.
Prosjektet kombinerer teknisk innovasjon og brukersentrert design for å skape en effektiv og pålitelig robot som avlaster lagerarbeidere med krevende oppgaver.
📽️ Se video og les mer om Grab her.
Som eneste designer i teamet har jeg hatt ansvar for:
Industridesign: Utforming av Grab’s fysiske utseende og valg av materialer.
UI/UX-design: Utvikling av Grab™ UI med fokus på brukervennlighet og funksjonalitet (se egen side).
Brukertesting: Planlegging og gjennomføring av tester for å sikre at løsningen møter kundens behov.
Tverrfaglig samarbeid: Jobbet tett med utviklingsteamet for å integrere teknologi og design.
Min rolle i utviklingen
Designverktøy: Adobe Photoshop, Adobe Illustrator, Onshape, Fusion360, Keyshot.
Metodikk: Double diamond, observasjon, prototyping og intervjuer.
Lærdom: Hvordan iterasjon, tverrfaglig samarbeid og kundeinnsikt skaper robuste løsninger under tidspress.
Erfaring og lærdom
Tidslinje - utvikling av Grab fra 2020 til nå

Smakebiter fra designprossessen
-
![]()
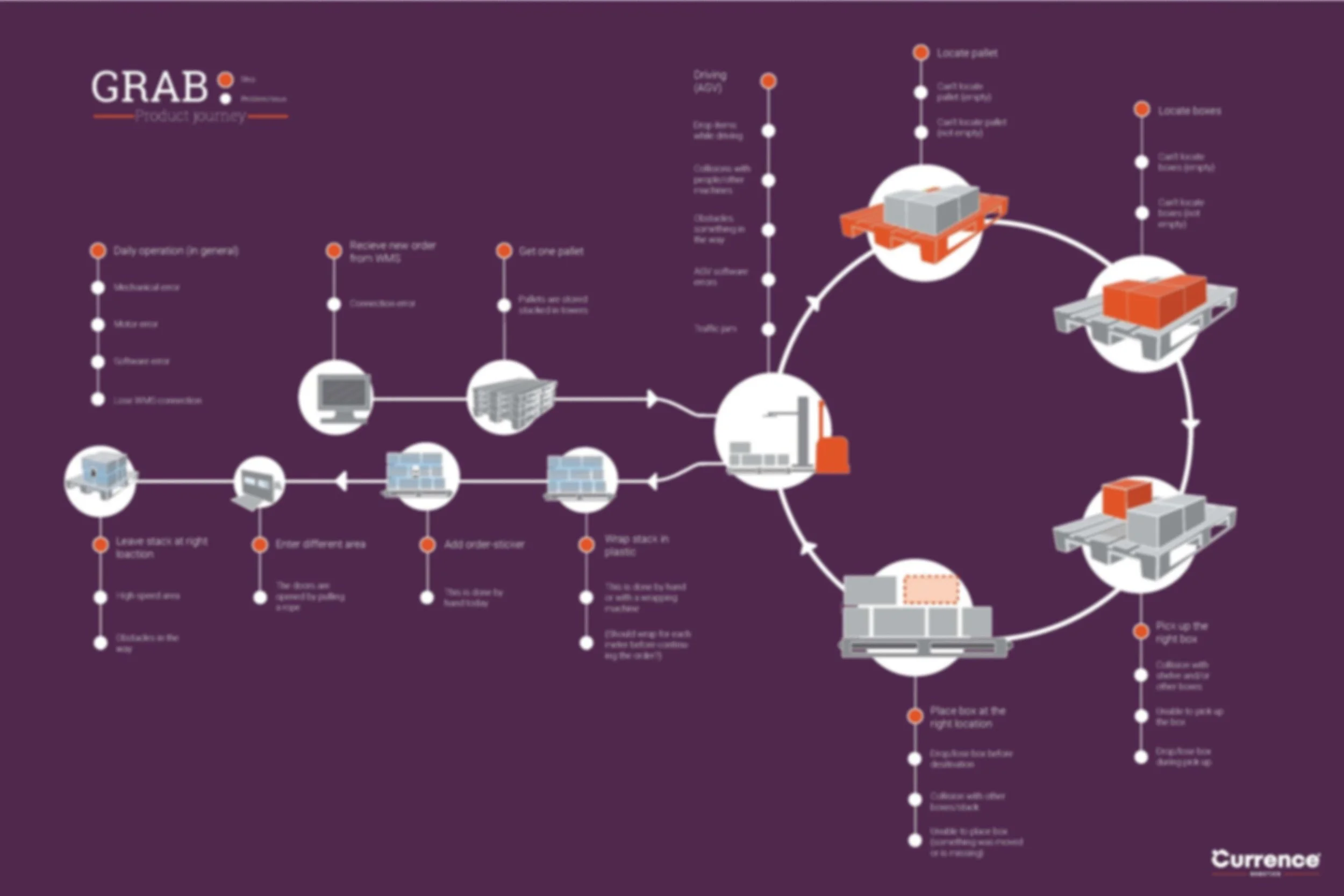
Kartlegging av prosessen
Alt starter med kartlegging. Hva går produktet gjennom fra start til slutt? Hvilke utfordringer kan vi forutse, og hvordan kan vi løse dem? Ved å visualisere hele prosessen og identifiserte painpoints fikk jeg god innsikt jeg kunne dele med teamet for en felles forståelse.
-
![]()
Workshops: Design og tillit
Som en del av masteroppgaven min, "Roboter som kollegaer," utforsket jeg hvordan robotens ytre og væremåte påvirker arbeidsmiljøet. Workshopene bidro til å forstå menneske-robot-interaksjon og hvordan design kan bygge tillit.
-
![]()
Iterering: fra skisse til fysisk modell
Å finne det beste designet handler om å prøve, feile og forbedre. Jeg begynte med skisser for å utforske ideer, fortsatte med 3D-utskrifter for å teste proporsjoner, og brukte til slutt leire for å utforske teksturer og former.
-
![]()
1:1 Prototyping
Den fysiske roboten er lokalisert i Ålesund, men for å kunne teste funksjoner i Trondheim, laget jeg en 1:1-modell av hovedkabinettet til Grab. Dette gjorde det mulig å teste plassering av knapper, skjermer og batteribytte. Modellen skapte også et solid grunnlag for workshops med kollegaer.
-
![]()
Test av plate-desing
Som en del av prototypingen brukte jeg brettede ark og papp-plater for å utforske mulige former og oppdelinger i tynnplatemetall. Dette bidro til å visualisere designet raskt og kostnadseffektivt.
-
![]()
Større leiremodeller
Det er noe med å kunne holde og se modellen fysisk. Ved å bruke større leiremodeller ble diskusjoner og samarbeid enklere, noe som resulterte i bedre og mer gjennomarbeidede løsninger.
-
![]()
Videreutvikling: en iterativ prosess
Leiremodellene ble brukt og endret på gjennom flere år, stadig oppdatert med nye 3D-printede deler og endringer basert på behov eller krav til nyere Grab-versjoner.
-
![]()
Utviklingen fra Grab #1 til Grab #2
Utviklingen av Grab er et resultat av stramme tidsrammer, små produksjonskvanta og begrensede ressurser. Likevel har vi oppnådd store forbedringer over tid! Blant annet gjennom samarbeid med både Inventas og EGGS Design.
-
![]()
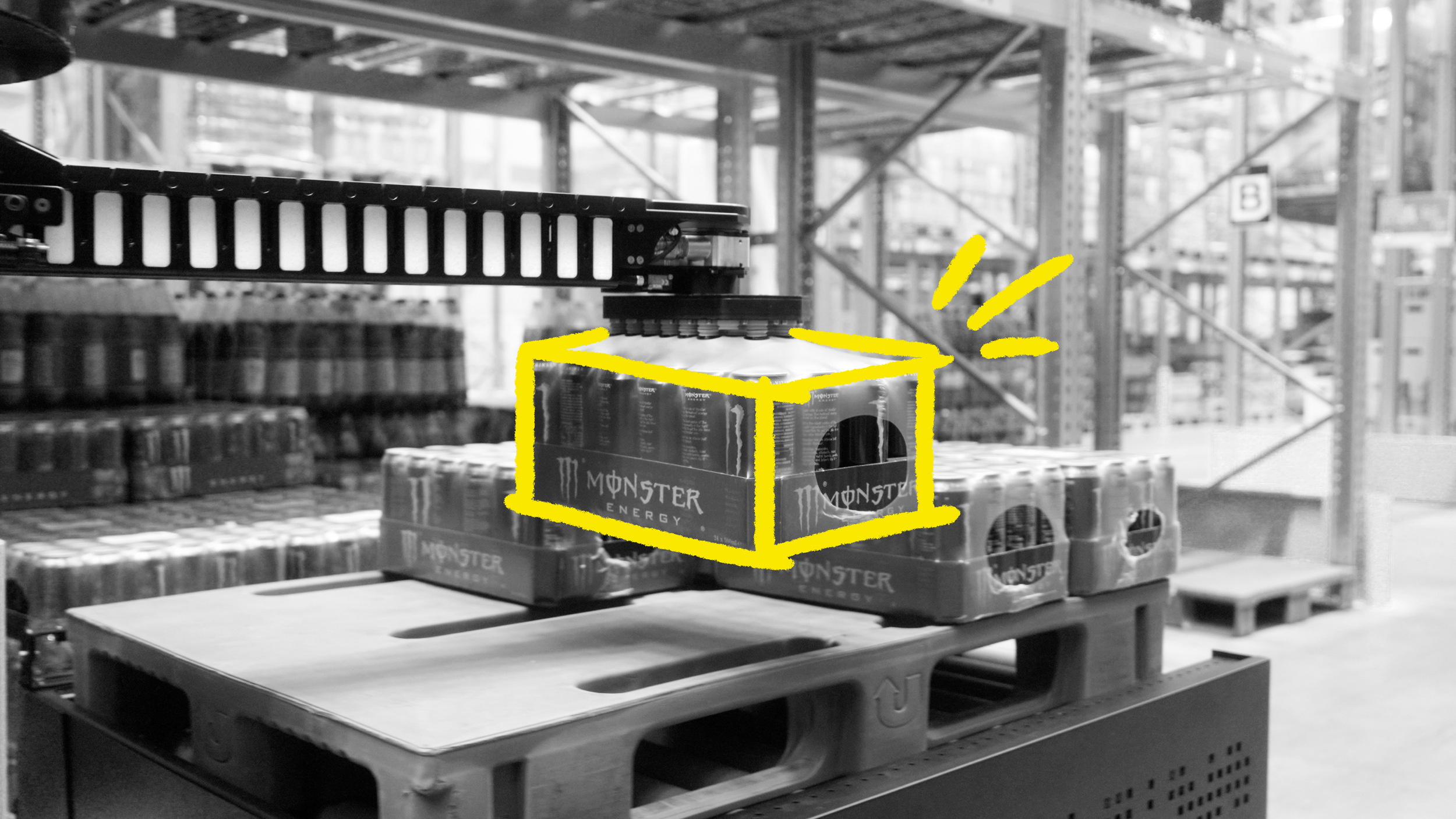
"Skal en ha noe gjort ... - "
For å vise effekten av synlige merker på "snaken," robotarmen som brukes til plukk, dro jeg selv til Ålesund for å montere klistremerker. Dette sikret at Solwr-branding og sikkerhet ble ivaretatt, selv om monteringstiden var lang.
-
![]()
Digitale workshops
Hver prototype ble fulgt opp med digitale og/eller fysiske workshops med tverrfaglige team. Diskusjoner om hva som fungerte, hva som kunne forbedres, og hvilke behov som skulle dekkes i neste versjon, ga verdifull innsikt og klare mål.
-
![]()
Test av design i Keyshot
Raske visualiseringer i KeyShot ble brukt til markedsføring før prototypen var ferdig montert. Dette skapte et profesjonelt førsteinntrykk og ga et innblikk i det endelige produktet.